
Automatic guided vehicles (AGV) have many navigation methods, such as magnetic stripe navigation, magnetic nail navigation, ribbon navigation, two-dimensional code navigation, laser navigation, and visual natural navigation. Among them, magnetic stripe navigation is the most common, because the entire driving path of the AGV has a magnetic stripe to provide continuous navigation information, so it is simple to use and safe. The disadvantage is that the magnetic strip is damaged due to rolling or corrosion, and it is not easy to maintain. Ribbon navigation and magnetic stripe navigation have similar advantages, but they are all visual navigation like two-dimensional code navigation and have higher requirements for the application environment. It is necessary to keep the ribbon and QR code clear and tidy at all times, so it is not easy to maintain. Laser navigation acquires a map of the entire working environment by detecting terrain by lidar, and can plan routes independently, with high flexibility and easy maintenance. But the cost is high and the technology is difficult. The magnetic nail navigation scheme uses magnetic nails instead of magnetic strips to provide navigation information for AGV driving. Compared with magnetic strips, it is not easy to be damaged. Compared with two-dimensional codes and ribbon navigation, it has lower environmental requirements and low cost compared with lasers. Nail navigation has many advantages, but compared to magnetic stripe navigation, it is still more complicated to use than magnetic stripe navigation. Now we will introduce the magnetic nail navigation scheme and principle provided by Suzhou Manplus Sensor Technology Co., Ltd.

Magnetic nail navigation and magnetic stripe navigation both require magnetic navigation sensors to locate the left and right deviation of the AGV relative to the path. Because the magnetic nail navigation cannot be laid continuously like a magnetic strip, and in order to facilitate laying and maintenance, the distance between two adjacent magnetic nails is generally at least 1 meter. In this way, the AGV loses navigation information between the magnetic nail and the magnetic nail (referred to as the blind zone), and it is unpredictable and unsafe to operate in the blind zone. Therefore, the magnetic nail navigation, like the two-dimensional code navigation, needs an angle sensor to provide the heading angle for the AGV, and guide the AGV to operate correctly between the magnetic nail and the magnetic nail. As shown in Figure 1 below:
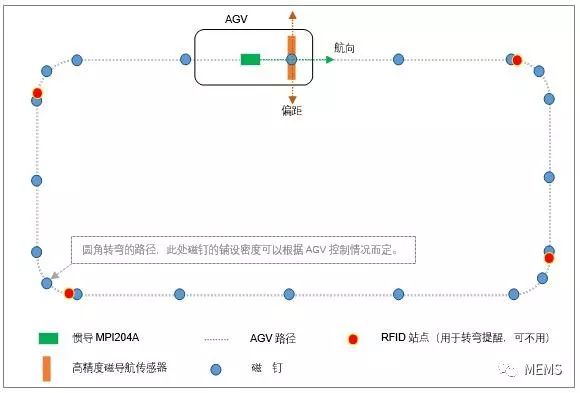
figure 1
As shown in the above figure, if the heading angle provided by the angle sensor is always accurate, coupled with the good control of the motor, the spacing of the magnetic nails can be larger, which can greatly reduce the difficulty of magnetic nail laying and maintenance, and it is also beautiful. However, the angle sensor, that is, the inertial navigation module, will produce accumulated errors due to the characteristics of the gyroscope, and there is no way to be accurate all the time. The heading angle information provided by the inertial navigation module is the angular velocity Rt obtained by the gyroscope, and then the angular velocity is integrated with the time t to obtain the accumulated angle g, as follows:

The angular velocity output by the gyroscope has different degrees of drift error or noise due to performance differences, and the error and noise are also accumulated over time. Especially in the case of considering the cost, a cost-effective gyroscope is used, so the angle error caused by the gyroscope cannot be ignored during the entire operation cycle of the AGV, otherwise the AGV may derail due to the angle error and cannot reach the next magnetic nail. . Therefore, the angle sensor needs to be continuously compensated during the entire operating cycle of the AGV. How to compensate? The assistance of the magnetic navigation sensor is needed. At this time, the laying distance of the magnetic nails and the installation position of the magnetic navigation sensor need to be specially corresponded. The details are shown in Figure 2 below:
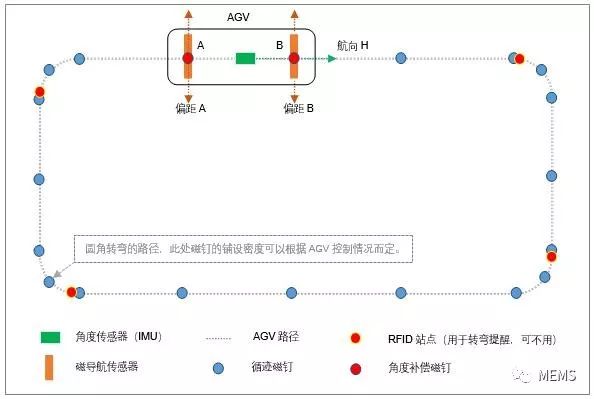
figure 2
As shown in the figure above, compared to the navigation solution in Fig. 1, the solution in Fig. 2 adds a high-precision magnetic navigation sensor. At the same time, the magnetic nails laid on the path are not only used for AGV tracking, but also have the function of compensating for the angle sensor. The laying distance of magnetic nails with angle compensation function must be approximately the same as the installation distance of the magnetic navigation sensor, that is to say, when the AGV passes by such a magnetic nail, the magnetic navigation sensors A and B are located above the magnetic fields of the magnetic nails A and B at the same time. At this time, if the actual heading angle of the AGV car is H1, the heading angle output by the angle sensor is H, the output offset of the magnetic navigation sensor A on the magnetic nail A is LA, and the output offset of the magnetic navigation sensor B on the magnetic nail B is LB , As shown in Figure 3 below:

image 3
At this time, according to the Pythagorean theorem and the inverse trigonometric function formula, the angle φ between the actual heading and the path when the AGV passes over A and B can be known (assuming that the heading angle directly in front of the path is 0, φ is the actual heading angle H1 of the AGV):

It can be seen that the error H⌀ of the angle sensor is:

Whenever the AGV passes the magnetic nail with angle compensation function, the angle sensor will eliminate the error and provide continuous and relatively accurate navigation for the AGV's subsequent travel, so that the long-term angle error accumulation will not cause the AGV to derail. It can be seen from formula (2) that the accuracy of LB and LA (that is, the output accuracy of the magnetic navigation sensor) directly determines the error compensation accuracy of the final angle sensor. If the traditional dot matrix magnetic navigation sensor with 10 mm precision, this error is very large, but it will cause the angle sensor to get wrong compensation. The digital magnetic navigation sensor MPMGS200-F01 introduced by Suzhou Manplus Sensing Technology Co., Ltd. has an output accuracy of 1mm, which is very suitable for AGV magnetic nail navigation. Higher output accuracy leads to more reliable magnetic nail navigation solutions. The 1mm precision magnetic navigation sensor can not only ensure the stability of the system, but also reduce the performance requirements for the angle sensor.
To sum up, in the AGV magnetic nail navigation solution, the navigation of the AGV is not completely guided by the magnetic nail and the magnetic navigation sensor. It also needs to be used in conjunction with the angle sensor. For the magnetic nail navigation solution, Manplus Sensing Technology launched A cost-effective dedicated inertial navigation sensor MPI204A. If the path is complicated or too long, consider laying more magnetic nails with angle compensation function in the entire path (must appear in pairs). If the path is simple or short, or the performance of the angle sensor is good, then the entire path only needs to lay a pair of magnetic nails with angle compensation function, depending on the actual situation.
Langrui Energy (Shenzhen) Co.,Ltd , https://www.langruibattery.com