
Continuing yesterday’s article, according to “gmauthority.comâ€, it is now time for Bolt EV to launch a larger-scale OTA for traditional auto companies. There are problems with the batteries, and they can be made up by software and will become the norm in the future.
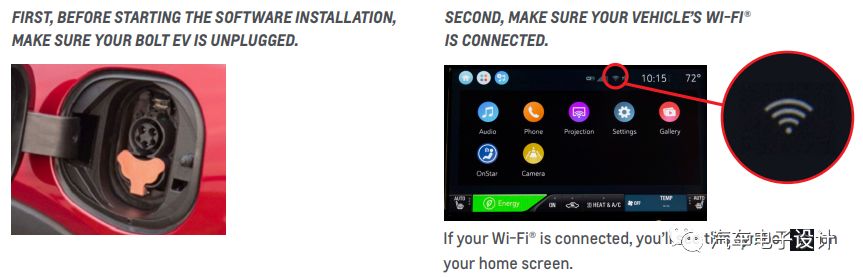
General Motors has officially responded to reports of isolated battery cell failure in 2017 Chevrolet Bolt EV models.In response to the possible issue, the automaker will roll out a software update for Bolt EV that dealerships will perform free of charge.
GM told InsideEVs that the recall is not a safety recall, but asked that all owners participate in the software update. Some owners have reported battery cell failure that leaves the Bolt EV without drive power.
After analyzing Onstar data, GM noted the issue seems isolated isolated very early production units of Bolt EV. The automaker will continue to comb through its data and notify owners who may be at risk for battery cell failure.
The software update will introduce “additional warnings if a battery cell low voltage condition occurs, which could cause the vehicle to reduce or lose propulsion.†Owners will see an indicator light if the battery is at risk of cell failure.
The update will not fix bad battery cells. additional, starting at the end of this month, Chevrolet and GM will begin pushing over-the-air software updates to the Bolt EV. It will make the Bolt EV the first vehicle from GM to make Use of a vehicle's internet connection for seamless updates without having to visit a dealership.
The forum also sent relevant information to the owner:
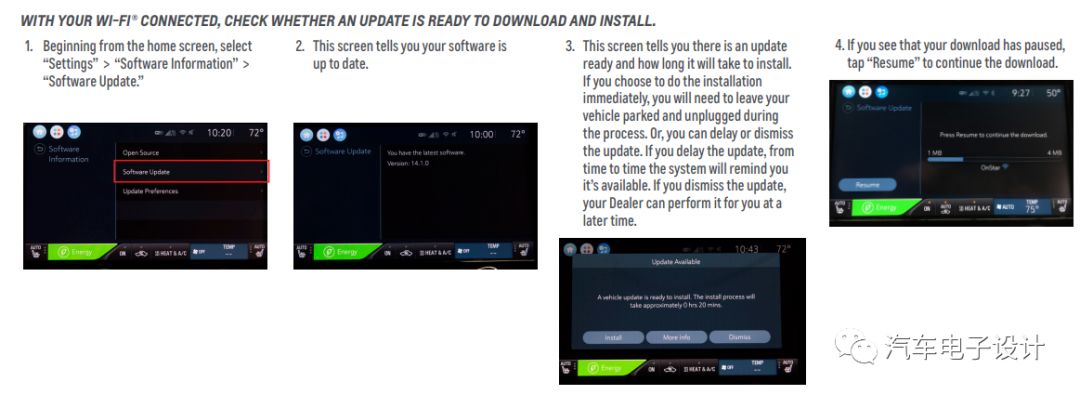
Just got an email from GM titled "2017 Bolt EV Software Updates" and providing instructions for owner-initiated updates. Not going to reiterate the email here, but here is a like to the instructions: http://gmrecall.xert.net/ Publicimage...uctions_F2.pdf
This is exactly what GM's SuSanta Sarkar and James Forsmark published "Automobile Automation Software Update OTA System Engineering", for automotive electronics, this will become the standard configuration of future electric vehicle manufacturers to deal with future problems.
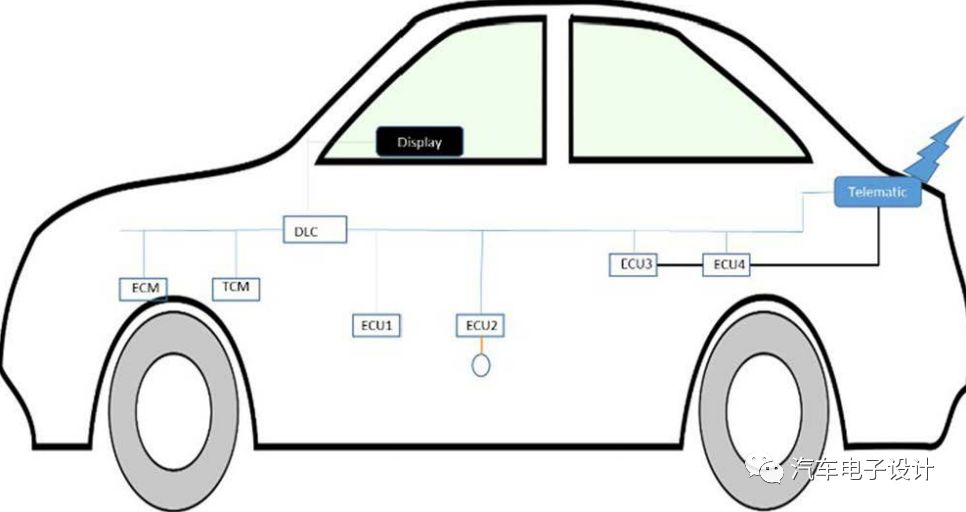
Automotive electronics systems have traditionally been designed as embedded distributed systems that broadcast data primarily in local communication subnets. These systems consist of many electronic control units (ECUs) connected through various types of communication networks. Traditionally, entire vehicle companies design and build these ECUs through suppliers, and then assume responsibility for integrating communications and verification. In this framework, updating component software requires connecting external tools and updating the intended ECU. This method has the following problems:
• From the point of view of suppliers and performance, each ECU's software update is considered as a separate event. Therefore, in the design refresh software, the supplier will not check how long it takes for the ECU to refresh the software. It will be used as a key parameter.
• In the normal design process, only the software update of a single ECU is considered. At the same time, updating multiple ECUs is not considered. The bandwidth of the communication network required for multiple ECUs to be updated at the same time is not controlled by any one supplier.
• Software update dependencies between ECUs are often unclear. After the 4S shop is trained, repair technicians can use manual error detection methods to patch hidden dependencies and install other software updates as necessary.
• In order to ensure the integrity of the system, the ECU's sensors or actuators need to be manually operated after the software is updated.
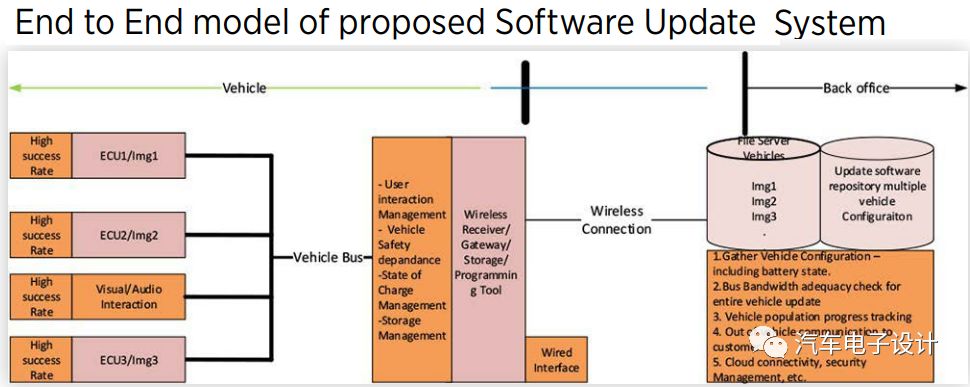
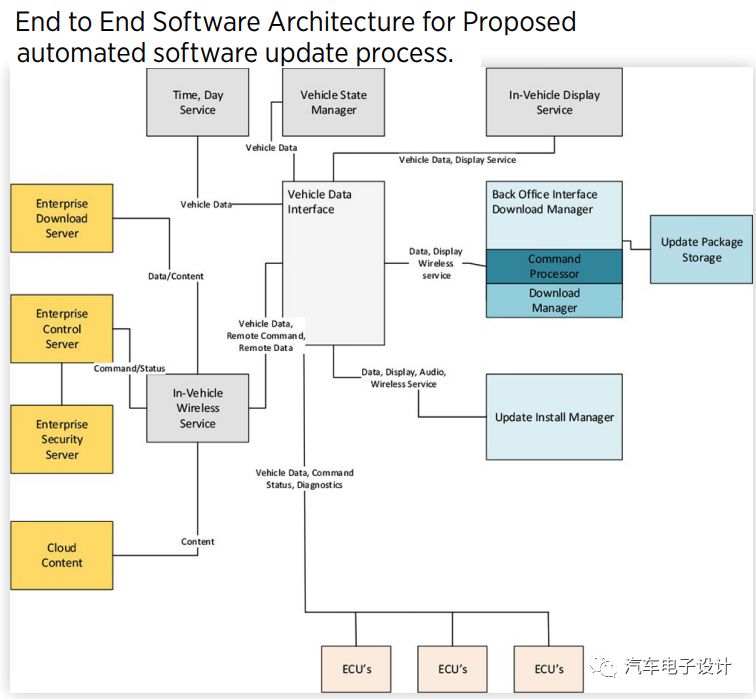
This article introduces the previous issues and proposes a Proposed Model of System Architecture.
The system architecture can consider various business drivers to organize software architecture and software elements. Since the lifecycle of a vehicle is usually around ten years, the software update system itself is also updatable. The systematic approach to achieving this goal is to have a well-defined possible separation of software elements and to ensure that specially designed interfaces do not change over time. This approach helps a change in a software element not affect the entire system. Software elements can be mapped to one or more "objects" or "services"
Magnetic Transducer External Drive Type
The magnetic transducers (External Drive Type) are versatile and customizable to different physical sizes, housings, mounting options, power consumptions. Our magnetic transducers are engineered to be used with an external drive circuit. This allows our customers the flexibility to design and customize the circuitry to meet their needs. External circuitry allows different frequency ranges to be used to create multiple sounds through excitation waveform. Our magnetic transducers come in a slim-line profile and are a cost-effective solution. Our extensive capabilities make our magnetic transducers an excellent solution for high/low tones, siren, and chime sounds.
Piezoelectric Buzzer,Passive Magnetic Buzzer,External Drive Buzzer,Magnetic Transducer External Drive Type
Jiangsu Huawha Electronices Co.,Ltd , https://www.hnbuzzer.com