
In today's automobile engine cylinder handling operations, it is easy to determine the accuracy of the robot grabbing the cylinder due to insufficient recognition of the industrial camera. As a result, automakers and machine vision solution providers work together to enhance the performance of industrial camera vision and positioning algorithms to achieve more accurate cylinder coordinates and make robotic grabs more efficient.
Beijing Hyundai Motor Co., Ltd. (hereinafter referred to as Beijing Hyundai) has three complete vehicle production plants, three engine production plants and a technical center with independent research and development, and has nearly 300 robots, which are applied to body welding and body stamping. Various key stations such as engine assembly and painting.
In the engine production plant, the cylinder handling work of the automobile engine is carried out by a robot manufactured by Hyundai Motor Co., Ltd., and when the robot is guided to carry out the cylinder transportation, the industrial camera and visual software customized by the Korean side are used in the production. In the process, I encountered a thorny problem, mainly because the camera took a picture and the test was unsuccessful. It took several photos to make the test successful, which affected the work efficiency. Therefore, Beijing Hyundai decided to carry out technological transformation to achieve efficient and accurate gripping of the cylinder by the robot.
This problem has been plaguing Beijing's modern technicians during the transformation. At the application site, the cylinders are stacked on a layer of trays, with the stacking of cylinders in different directions (Figure 1). Since the cylinder has only one gripping position (Fig. 2), the robot will automatically rotate the claws by 0, 90, 180 or 270 degrees when grabbing, and then according to the approximate position of each cylinder on each pallet. Take a photo capture, and the camera will rotate with the claws, so the images obtained are in one direction, and the camera follows the robot to change the direction of the camera, which directly affects the accuracy of the capture.
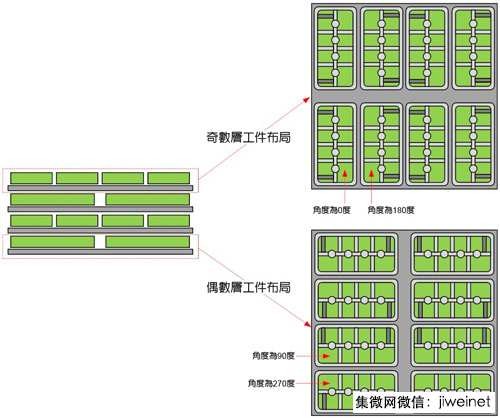
Figure 1 cylinders are placed in different directions

Figure 2 cylinder grab position
Description of velcro cable sleeve for cable harness
Velcro cable sleeve is a nonexpandable sleeving woven from monofilament (weft) and multifilament (warp) polyester yarns. It provides a lightweight, costeffective and tough solution for the protection of a wide range of components. Its inherent flexibility allows it to bend, coil and conform to irregular shapes, while its open design allows it to be installed on completed assemblies.
Material: Polyester monofilament and multifilament
Operating range: -50 °C ÷ 150 °C
Melt point: 250°C ± 5
Flammability: VW-1
Approved: RoHS, Halogen free
Standard colours : black, grey
Cutting tool: scissors
Colorful self closing braid wrap for automotive
Self closing velcro cable sleeve is a non-expandable sleeve woven from monofilament weft and multi-filament warp.
It provides a lightweight, cost effective and tough solution for protection of a wide range of wire and cable.
Its inherent flexibility allows it to be bend, coil and fit with irregular shapes while its open design allows it to be install on finished assemblies quickly.
Conduit Cable Sleeves,White Fabric Cable Sleeving,Black Fabric Cable Sleeving,Velcro Cable Sleeve For Cable Harness
Shenzhen Huiyunhai Tech.Co.,Ltd , https://www.hyhbraidedsleeve.com