
2.2 Characteristics and description of texture images
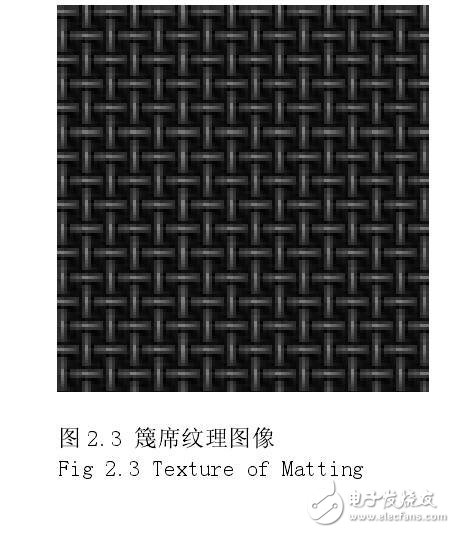
The texture is characterized by the spatial distribution of the neighborhood gray of the pixel, so it cannot be defined by dots. There is no unified understanding of the precise definition of the image texture. This paper cites a more popular definition as follows. Texture refers to a repeating pattern in which the intensity of the image changes locally. The mechanism of texture formation is the size of the local pattern of the image, and it is generally impossible to separate different objects or regions at a given resolution. Thus, a set of connected pixels that satisfy a given gradation characteristic in an image region constitutes a texture region. The simplest example is the repeating pattern of black dots on a white background; for example, a line of characters printed on white paper constitutes a texture; Figure 2.3 is an example of a texture image.
Currently, texture analysis contains three main problems: texture classification, texture segmentation, and texture image restoration. Because the segmentation of fingerprint images in this paper is closely related to texture segmentation technology, the method of texture analysis is briefly explained. There are two commonly used methods, one is the gray level co-occurrence matrix measurement method, and the other is the autocorrelation function method.
2.2.1 Gray level co-occurrence matrix
The co-occurrence matrix P[i,j] is a two-dimensional correlation matrix, which is defined as follows: First, a displacement vector d = (dx, dy) is specified, and then the calculation is separated by d and has gray The number of all pixel pairs of degrees i and j. A displacement vector of (1, 1) means that the pixels move one step to the right and down. Obviously, when the number of gray levels is n, the co-occurrence matrix is ​​an n&TImes;n matrix. For example, consider a simple 5&TImes;5 image with gray levels 0, 1, and 2,

As shown in Figure 2.4, since there are only three gray levels, P[i,j] is a 3&TImes;3 matrix; in the 5&TImes;5 image, there are 16 (the specified distance vector d = (1,1)) In the case where the pixel pair satisfies the spatial separation; first, the number of all pairs of pixels is calculated, that is, the number of pairs of pixels whose distance between all pixel values ​​i and pixel value j is d is calculated, and then this number is filled into the matrix P. The i-th row and the j-th column of [i, j], for example, have three pixel values ​​of [2, 1], so 3 is written in the P[2, 1] term, so the pixel pair is calculated as the matrix. Figure 2.5 shows.
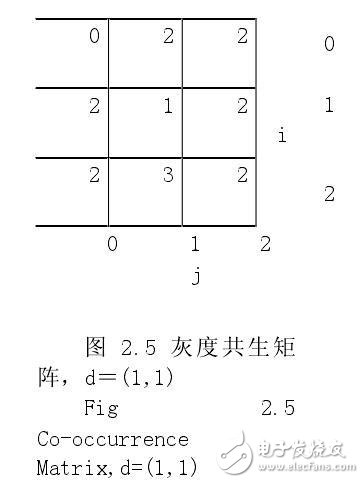
Since the number of pairs of pixels having gray levels [i, j] does not need to be equal to the number of pairs of pixels of gray level [i, j], P[i, j] is an asymmetric matrix, P[i, j] is the normalized matrix of the total number of pairs of pixels; in the above example, each term divided by 16 results in a normalized matrix, since the sum of the values ​​of the elements of the normalized matrix P[i,j] is 1, It can be thought of as a probability mass function.
The gray level co-occurrence matrix represents the spatial distribution of the image gray, which can be easily illustrated by a simple example below. Consider a binarized image with a chess box of 8 x 8, as shown in Figure 2.6, where each square corresponds to a pixel.
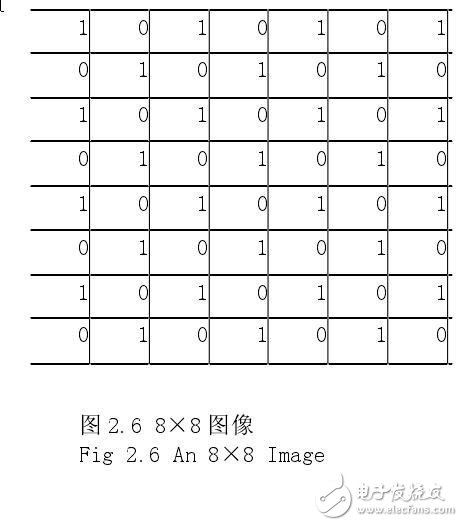
Due to the two levels of gray, P[i,j] is a 2x2 matrix. If the distance vector d = (1, 1) is still defined, the normalized matrix P[i, j] is obtained, as shown in Figure 2.7. Due to the regularity of the structure of the pixel pairs, only pixel pairs [1, 1] and [0, 0] appear. The off-diagonal elements of the matrix are zero.

As can be seen from the above example, if the black pixels are distributed over the entire image without a fixed pattern, then the gray level co-occurrence matrix does not have any preferential set of gray level pairs, then the matrix element value at this time Is uniformly distributed, a characteristic parameter used to measure the randomness of the gray level distribution is called entropy, defined as

When all the terms of the matrix P[i,j] are zero, the entropy value is the highest, and the image corresponding to such a matrix does not have any dominant gray level pairs of the specified displacement vector.
2.2.2 Autocorrelation function method
An auto-correlation function p[k,l] of an N×N image is defined as (2.13)
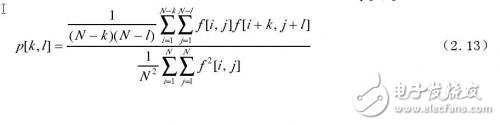
For images with repeated texture patterns, the autocorrelation function exhibits a certain periodicity, and its period is equal to the distance of adjacent primitives. When the texture is rough, the autocorrelation function slowly decreases, while the fine texture decreases rapidly. The autocorrelation function can be used to measure the periodicity of the texture and the size of the texture primitives.
Through the above introduction, we found that when the texture primitive is small and becomes microtexture, it is particularly useful to use the gray level co-occurrence matrix. On the contrary, when the texture primitive is large, it is not very effective to directly use the gray level matrix. It even fails; at this time, it is necessary to find other methods to determine the texture structure. The autocorrelation function method is useful for measuring the periodicity of the texture and the size of the texture, but the algorithm complexity of the autocorrelation function method is relatively high. If the larger image is directly compared with the autocorrelation function method, the calculation amount is too large; In order to reduce the number of operations, the image can be divided into blocks, and then each block can be correlated.
2.3 Features and description of fingerprint images
The fingerprint image is a special digital texture image, so it has the properties of digital image and the nature of texture image. In addition to the above two commonalities, the fingerprint image also has the special property of fingerprint.
1 fingerprint image has directionality, but the directionality of the fingerprint is different from the directionality of the texture. Generally, the direction of the texture is generally consistent, but the fingerprint image is only consistent in the local part of the fingerprint, and the fingerprint image is There is also continuity in the local direction, as the direction of the different fingerprint lines changes, but the change is slowly changing.
2 The width of the line in the fingerprint image is limited, it is not very wide, and it is not very narrow, which is another aspect of fingerprint image difference and other texture images. This provides a useful prior knowledge for image segmentation.
3 The lines included in the effective area of ​​the fingerprint image appear alternately in black and white. In the local area of ​​the effective area, there are no two consecutive white lines, and two consecutive black lines do not appear. This is also a priori knowledge of the fingerprint image, which can help the processing of subsequent fingerprint images.
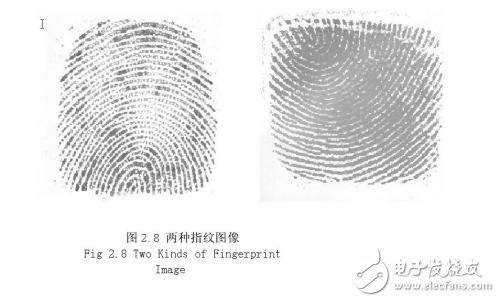
4 The noise of the fingerprint image is also different from other digital images. Most of the noise in the general digital image can be regarded as random noise, which can be removed as much as possible by using a number of off-the-shelf algorithms. In addition to the random noise, the noise of the fingerprint image also has noise caused by the device or other human factors. The general performance of the noise is: the lines in the image are intermittent, the lines are not clear, and the lines are not continuous; or in the image The lines of the lines all stick together, and the direction of the lines cannot be distinguished; this noise causes great difficulty in segmenting the fingerprint image. Figure 2.8 is two fingerprint images with such noise.
λ/ 10 - the visible window sheet is a parallel plane plate, which is usually used as a protective film for electronic sensors or detectors in the external environment. We provide flat windows on a variety of substrates without coating and antireflection coating. Antireflective film options include UV, VIS, NIR, and SWIR. Barium fluoride (BaF2), calcium fluoride (CaF2), zinc sulfide (ZnS), zinc selenide (ZnSe) or silicon (SI) germanium (GE) are suitable for infrared applications, while fused quartz and sapphire are suitable for ultraviolet applications.

optical windows
Hanzhong Hengpu Photoelectric Technology Co.,Ltd , https://www.hplenses.com