
How to realize the establishment of wireless communication network, in order to ensure that the anchor point can communicate with the PAN coordinator normally, a communication network is inevitable. At the same time, it can be roughly divided into four scenarios: a multi-anchor ranging scenario, a data returning scenario, a link change scenario, and a character moving scenario.
In the RTLS system, it is necessary to detect the distance between the tag and the anchor in real time, and combined with the position of the anchor itself, the relative position of the tag can be obtained according to the scaling algorithm. In the actual application scenario, an anchor detection network needs to be set up, and the detected distance information is transmitted back to the upper computer system, and the specified label is converted according to the coordinate information of the anchor point relative to the local map and the detected distance information. Location information, in order to achieve the detection of a specified label in a specific range, in addition to support the position calculation of the label itself, that is, the label can obtain the location information of the anchor point through the network and combine the test results to calculate its own position.
In the actual operation of the RTLS system, it can be roughly divided into four scenarios: a multi-anchor ranging scenario, a data returning scenario, a link change scenario, and a character moving scenario. As shown in Figure 2-1:
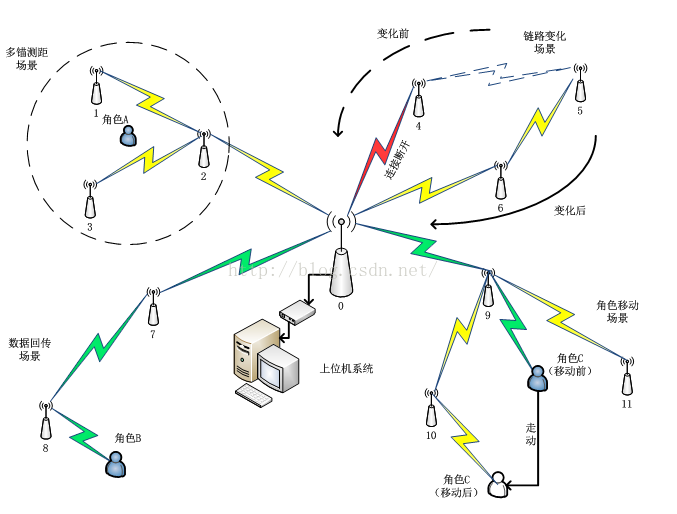
Figure 2-1 RTLS system scenario description
If the RTLS system can ensure safe and stable operation in these four scenarios, the anchor point monitoring network is constructed in the area to be monitored, and no blind spot label distance measurement and monitoring data back-transmission are realized within the scope. In these four scenarios, the following problems are generally faced:
1) Wireless communication network formation
2) Label position information detection
3) Measurement when the label moves
4) Effective detection and utilization
3. Detailed explanation and solution
Wireless communication network formationProblem Description:
In order to ensure that all anchors can normally communicate with a specific anchor (PAN coordinator), a communication network must be constructed, and the message is routed through a point-to-point or point hop to the destination anchor. The existing chip DW1000 has implemented the PHY layer and the MAC layer, so that the anchor point has the capability of peer-to-peer communication, that is, support for constructing a communication network topology. In order to build a communication network, we need to implement a network layer protocol (routing protocol) on the MAC layer, so that communication between anchors can be achieved.
plan description:
The routing protocol for low-speed wireless personal area networks is currently the AODV algorithm and its improved algorithm. The AODV algorithm is designed to establish and maintain a dynamic, self-starting, multi-hop routing proprietary network among multiple mobile nodes. However, the AODV algorithm is more complicated and considering the particularity of the requirements in this case, it is also necessary to define an improved algorithm to better adapt to the communication requirements of the solution.
Description of program communication features:
The network communication in this case is mainly responsible for transmitting the distance information measured by the tags to the host computer. It has the following characteristics:
1) The destination address is predictable and the location changes infrequently.
2) The communication method is mainly unidirectional.
3) Communication nodes (anchor points), the position changes infrequently.
4) The communication data is in connectionless mode.
5) Link repairable
6) Nodes are automatically added
So we only need to build a one-way communication network that guarantees that the tag has no connection to the anchor origin.
It can refer to the establishment process of the tree network topology of AODV, and simplify the algorithm of the route node to optimize the routing circuit construction process. The anchor point is responsible for establishing the maintenance communication network, and the tag triggers the data communication process. The tag belongs to the temporary node of the network, and each time the message is sent, the network node needs to be searched, and the measurement message is sent after success.
Routing protocol description:
Referring to the characteristics of the tree topology diagram, the routing function of each node is defined as follows:
1) The node needs to maintain its own layer number, parent node address, and child node address.
2) The node can forward the data from the child node to the parent node.
3) The node can forward the data (broadcast data) from the parent node to all child nodes.
4) When the node is disconnected from the parent node, all child nodes need to be notified.
5) The parent node is the child node of the anchor origin or the anchor origin.
6) Select the optimal parent node according to the number of layers.
Give these definitions the ability to build, maintain, and communicate network topologies.
Ø Network topology construction processAfter all the anchor points have been installed and the anchor point origin has been selected, the network topology is constructed as follows:
1) The parent node listens to the parent node query message broadcast, and the anchor point origin is the first parent node.
2) The anchor point (free node) without the parent node broadcasts the parent node query message and carries its own address
3) After the parent node listens to the parent node query message broadcast, it sends its own address and layer number information to the query node.
4) The child node determines the parent node according to the received layer number information, records the parent node address, and adds information to the parent node sending child node.
Ø Network topology construction maintenance processAfter the network topology is established, when there are anchors damaged, moved, added, and removed when the network is maintained.
1) The anchor point is scheduled to broadcast your good news.
2) The child node periodically sends the message to the parent node.
3) When the parent node receives me, after the message times out, delete the child node address.
4) When the child node receives the hello message timeout or the received free node disappears, it sends a message to all the child nodes to become a free node, and becomes a free node itself, and executes the free node to find the parent node flow.
5) The new node is a free node.
Ø Data communication processThe direction of all data communication in the network is that the child node communicates with the parent node, and the node forwards it to his father after receiving the data.
1) All nodes listen for data report request messages.
2) The node passes the received data report message to the parent node.
3) The data report request message is generated by the tag.
Ø All message format definitions
Please refer to the AODV protocol.
Tag location information detectionProblem description and solution
According to the position measurement principle, the calculation of the tag position information depends on the distance between the tag and the anchor point and the position information of the anchor point itself. Considering the error of the actual measurement and the accuracy of the calculation result, the label should report the distance information between him and the surrounding anchor point as much as possible. The difficulty with this problem is the determination of the anchor position, ie if the anchor position in the network is located. The methods currently considered are as follows, but each has its own advantages and disadvantages:
Option 1: Manually measure the position information of each anchor point. The advantage of this scheme is that the error is controllable. The disadvantage is that when the anchor point is increased or the indoor environment is complicated, the measurement workload is suddenly increased.
Option 2: Manually measure the position information of several specific anchor points, and then estimate other anchor point information based on the known anchor position information and distance. The advantage is that the measurement speed is fast, and the disadvantage is that the measurement error is uncontrollable.
Distance testing and data reporting process
The data information of the tag and the anchor point distance is finally sent to the anchor origin through the communication network through the data report request message, and the upper computer is connected with the anchor point origin, so that the position information of the tag can be calculated according to the reported data information. The specific process is as follows:
1) The tag timing is performed with all anchor points around him.
2) The tag picks the anchor point closest to it in the measurement result, encapsulates the measurement data into a data report request message and sends it to it.
Measurement when the label movesProblem description and solution
When the tag moves, it will cause a change in the anchor point with which he is ranging, but the problem is simple as long as it is determined that it is timed to the surrounding anchor point and the host computer decides how to use these measurements. The tag only needs to care about the address of the anchor closest to it. This problem can be solved by timing ranging.
Effective detection and utilizationProblem description and solution
How to determine the distribution of anchor points is also a problem in the case where the area to be monitored is determined. In order to improve the accuracy of detection and reduce the blind spot of testing, it is of course necessary to add more anchor points, which can lead to the responsibility of the communication network and increase the number of times of communication forwarding. If the anchor point is too sparse, it will lead to too little measurement data, which will cause the position estimation to be biased, and even the blind spot will be detected. For the time being, there is no better way to solve this problem. The only way to think of it is to first add a small number of anchor points, and then add anchor points according to the actual test results.
Battery Online Monitoring System
Multifunctional Battery,Read Data And Information Battery,Safety Monitoring System Battery,Custom Monitoring System Battery
Wolong Electric Group Zhejiang Dengta Power Source Co.,Ltd , https://www.wldtbattery.com